last update: 2024/04
開発環境/IDE:Renesas CCRX (e2Studio)
| 圧縮・解凍 | emCompress-Embed, emCompress-ToGo |
|---|---|
| Modbus | Modbus Master (ASCII/RTU), Modbus Slave (ASCII/RTU) |
| TCP/IP over USB | emNet TCP/IPv4, FTP Server, TELNET, emNet driver over USB |
| セキュリティ | emSecure (RSA Sign and Verify) |
| 暗号・サイファー | emCrypt PRO (Ciphers, HASH, MAC, Digital Signature, Key Generation, NIST prime curves, random bit generators) |
| FileSystem | emFile FAT32, Encryption, Journaling, Disk Driver (MMC/SD Card, USB Disk, RAMDisk) |
| USB-Device | emUSB Device, BULK, CDC, HID, MSD, VirtualMSD, DFU, MTP, AUDIO, Printer Class, UVC, IP-over-USB component, USB Driver for RX |
| USB-Host | emUSB Host, BULK, HID, CDC, FT232, CCID, AUDIO, MSD, MIDI, MTP, Printer Class, RX Driver |
リリースプログラムの「EK-RX671」及び「Windows」フォルダを、開発環境インストール済みのユーザーパソコンのローカルドライブにコピーします。Windowsインストーラは不要です。
[Workspace] ├ EK-RX671 .... サンプルプログラム一式 └ Windows .............. テスト用PCツール
EK-RX671 ├ License.txt ............. 評価版ライブラリの利用条件 ├ src ├ Application ............. テスト用サンプルアプリケーション ├ BSP ............. ハードウエア依存設定、ドライバ ├ Config ............. コンフィグレーション設定、システム依存設定 ├ EVAL_Libs ............. SEGGERソフトウエア評価版ライブラリ ├ FreeRTOS ............. FreeRTOSカーネルソース(e2Studio FITで作成) ├ frtos_config ......... FreeRTOSコンフィグレーション設定 ├ frtos_skeleton ......... FreeRTOS関連 ├ frtos_startup ......... FreeRTOSスタートアップコード(ボード依存) ├ smc_gen ........ e2StudioのスマートFITコンフィグレータで作成されたBSP ├ .project ............. e2Studio環境用プロジェクト └ ek_rx671_freertos.scfg ..... e2Studio FITコンフィグレータ設定
Application
├ Main.c ...... メインエントリハンドラ
└ _Exclude ...... ※このフォルダはビルド対象外に設定しています
├ COMPRESS .... 圧縮・解凍機能のデモサンプル
├ CRYPTO .... 暗号・サイファー機能のデモサンプル
├ FS .... ファイルシステムのテストサンプル
├ MB .... MODBUS SLAVE / MASTER機能のデモサンプル
├ IP-Over-USB .... TCP/IPネットワーク通信機能のデモサンプル
├ SECURE .... 不正改造・不正量産を防ぐセキュリティソリューション
├ USBD .... USB Device各種クラス機能のデモサンプル
└ USBH .... USB Host各種クラス機能のデモサンプル
EK-RX671
└ BSP
├ BSP.c ......... ボード上のLEDインターフェースのドライバ
├ BSP_UART.c ...... ボード上のUARTインターフェース(J27)のドライバ
├ BSP_MMC_SD.c .... SDコントローラのハードウエア依存の初期化設定
├ BSP_USB.c ...... USBコントローラのハードウエア依存の初期化設定・割込みハンドラ
└ Setup ......... 各ソフトウエアライブラリのハードウエア依存のドライバ設定
ボードのクロック・PLL設定はFITコンフィグレータで行います。
メインクロック:24MHz
FlashIFクロック(FCLK):60MHz
システムクロック(ICLK):120MHz
周辺モジュールクロック(PCLKA):120MHz
周辺モジュールクロック(PCLKB):60MHz周辺モジュールクロック(PCLKC):60MHz
周辺モジュールクロック(PCLKD):60MHz
外部バスクロック(BCLK):120MHz
USBクロック:48MHz
※スマートFITコンフィグレータ設定内容の確認及び変更する場合は、以下の手順をご参照ください。
SU,SI,B_1,R_1,B_2,R_2,B,R,B_8,R_8/04,PResetPRG,C_1,C_2,C,C_8,C$*,D*,W*,L,P/0FFE00000,EXCEPTVECT/0FFFFFF80,RESETVECT/0FFFFFFFC
| 0x0000_0004 | SU, SI, B_1, R_1, B_2, R_2, B, R, B_8, R_8 |
| 0xFFE0_0000 | PResetPRG, C_1, C_2, C, C_8, C$*, D*, W*, L, P |
| 0xFFFF_FF80 | EXCEPTVECT |
| 0xFFFF_FFFC | RESETVECT |
#define configUSE_PREEMPTION 1 #define configUSE_IDLE_HOOK 1 #define configUSE_TICK_HOOK 1 #define configCPU_CLOCK_HZ (BSP_ICLK_HZ) #define configPERIPHERAL_CLOCK_HZ (BSP_PCLKB_HZ) #define configTICK_RATE_HZ (( TickType_t ) 1000) #define configMINIMAL_STACK_SIZE (( unsigned short ) 140) #define configTOTAL_HEAP_SIZE_N (30) #define configTOTAL_HEAP_SIZE (( size_t ) ( configTOTAL_HEAP_SIZE_N * 1024 )) #define configMAX_TASK_NAME_LEN (12) #define configUSE_TRACE_FACILITY 1 #define configUSE_16_BIT_TICKS 0 #define configIDLE_SHOULD_YIELD 1 #define configUSE_CO_ROUTINES 0 #define configUSE_MUTEXES 1 #define configGENERATE_RUN_TIME_STATS 0 #define configCHECK_FOR_STACK_OVERFLOW 2 #define configUSE_RECURSIVE_MUTEXES 1 #define configQUEUE_REGISTRY_SIZE 0 #define configUSE_MALLOC_FAILED_HOOK 1 #define configUSE_APPLICATION_TASK_TAG 0 #define configUSE_QUEUE_SETS 1 #define configUSE_COUNTING_SEMAPHORES 1 #define configMAX_PRIORITIES (16) #define configMAX_CO_ROUTINE_PRIORITIES (2) #define configUSE_TASK_NOTIFICATIONS 1 #define configUSE_TASK_DPFPU_SUPPORT 0 #define configRECORD_STACK_HIGH_ADDRESS 0 #define configNUM_THREAD_LOCAL_STORAGE_POINTERS 0 /* Dynamic allocation and static allocation. */ #define configSUPPORT_DYNAMIC_ALLOCATION 1 #define configSUPPORT_STATIC_ALLOCATION 0 /* Run time stats gathering definitions. */ unsigned long ulGetRunTimeCounterValue( void ); void vConfigureTimerForRunTimeStats( void ); #define configGENERATE_RUN_TIME_STATS 0 //#define portCONFIGURE_TIMER_FOR_RUN_TIME_STATS() vConfigureTimerForRunTimeStats() //#define portGET_RUN_TIME_COUNTER_VALUE() ulGetRunTimeCounterValue() /* Software timer definitions. */ #define configUSE_TIMERS 1 #define configTIMER_TASK_PRIORITY (6) #define configTIMER_QUEUE_LENGTH 5 #define configTIMER_TASK_STACK_DEPTH (configMINIMAL_STACK_SIZE) /* The interrupt priority used by the kernel itself for the tick interrupt and the pended interrupt. This would normally be the lowest priority. */ #define configKERNEL_INTERRUPT_PRIORITY 1 /* The maximum interrupt priority from which FreeRTOS API calls can be made. Interrupts that use a priority above this will not be effected by anything the kernel is doing. */ #define configMAX_SYSCALL_INTERRUPT_PRIORITY 14 /* The peripheral used to generate the tick interrupt is configured as part of the application code. This constant should be set to the vector number of the peripheral chosen. As supplied this is CMT0. */ #define configTICK_VECTOR _CMT0_CMI0 /* Set the following definitions to 1 to include the API function, or zero to exclude the API function. */ #define INCLUDE_vTaskPrioritySet 1 #define INCLUDE_uxTaskPriorityGet 1 #define INCLUDE_vTaskDelete 1 #define INCLUDE_vTaskCleanUpResources 0 #define INCLUDE_vTaskSuspend 1 #define INCLUDE_vTaskDelayUntil 1 #define INCLUDE_vTaskDelay 1 #define INCLUDE_uxTaskGetStackHighWaterMark 1 #define INCLUDE_xTaskGetSchedulerState 1 #define INCLUDE_eTaskGetState 1 #define INCLUDE_xTimerPendFunctionCall 1 void vAssertCalled( void ); #define configASSERT( x ) if( ( x ) == 0 ) vAssertCalled() /* Override some of the priorities set in the common demo tasks. This is required to ensure flase positive timing errors are not reported. */ #define bktPRIMARY_PRIORITY (( configMAX_PRIORITIES - 3 )) #define bktSECONDARY_PRIORITY (( configMAX_PRIORITIES - 4 )) #define intqHIGHER_PRIORITY (( configMAX_PRIORITIES - 3 )) /*----------------------------------------------------------- * Ethernet configuration. *-----------------------------------------------------------*/ /* MAC address configuration. */ #define configMAC_ADDR0 0x01 #define configMAC_ADDR1 0x12 #define configMAC_ADDR2 0x13 #define configMAC_ADDR3 0x10 #define configMAC_ADDR4 0x15 #define configMAC_ADDR5 0x11 /* IP address configuration. */ #define configIP_ADDR0 192 #define configIP_ADDR1 168 #define configIP_ADDR2 0 #define configIP_ADDR3 200 /* Netmask configuration. */ #define configNET_MASK0 255 #define configNET_MASK1 255 #define configNET_MASK2 255 #define configNET_MASK3 0 /* When the FIT configurator or the Smart Configurator is used, platform.h has to be used. */ #define configINCLUDE_PLATFORM_H_INSTEAD_OF_IODEFINE_H 1
評価版パッケージのサンプルプロジェクトはe2Studio IDE環境でビルド・デバッグ可能です。
e2Studioプロジェクトのビルド構成:HardwareDebug
EK-RX671 ├ HardwareDebug ............... 出力フォルダ(e2Studio環境プロジェクト) ├ .cproject ................... e2Studio環境用プロジェクト ├ .project ................... e2Studio環境用プロジェクト

デバッグツールはオンボード RX E2 Lite を使用します。評価ボードのDEBUG1 (J25) USB micro-Bコネクタをパソコンに接続してe2Studio IDE環境からプログラムのダウンロード及びステップ・実行デバッグ操作が可能です。
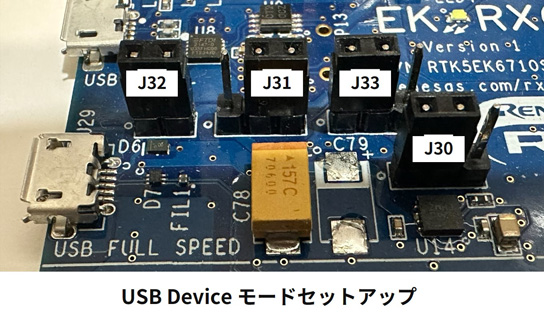
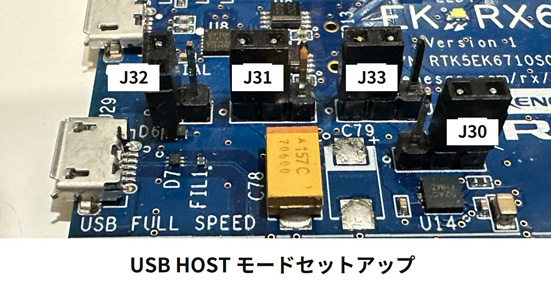
アプリケーション要件に合わせて評価ボードの DIPスイッチ、ジャンパーを設定します。
オンボードデバッグモード設定:
J29 USBポートのデバイスモード設定:
J29 USBポートのホストモード設定:
SEGGER's Friendly License (SFL), January 16th 2020
For non-commercial use or for evaluation purposes, you - regardless whether you
are an individual person or a legal entity - are welcome to use the software
free of charge under this license.
Any other use of the software is considered commercial use, for which a
commercial-use license must be obtained from SEGGER.
DEFINITIONS
"Non-commercial use" means using the software for teaching, learning, studying,
or projects that do not have a commercial background. If the software is used
for products or services intended to be sold, the use is considered to be
commercial.
"Evaluation" means you are trying out the software for possible future use.
While the length of this time period is up to you, once it becomes a standard
part of your workflow we no longer consider it evaluation.
DISCLAIMER OF WARRANTY
When using the software under this license, you accept that it is provided on
an "as is" basis, without warranty of any kind.
LIMITATION OF LIABILITY
When using the software under this license, you accept that SEGGER is not liable
for any damages arising out of the use of or inability to use the software.
3RD-PARTY SOFTWARE AND LICENSES
More information about 3rd-party components, if any, included in the software
and the licenses that these components are under can be found in the file
doc/license/3rd-party.txt after installation of the software.
RESTRICTIONS
You may not:
(a) decompile, disassemble, reverse engineer, or otherwise attempt to derive the
source code of the software,
(b) redistribute, encumber, sell, rent, lease, sublicense, or otherwise transfer
rights in the software,
(c) remove or alter any trademark, logo, copyright or other proprietary notices,
legends, symbols or labels of the software.
REVOCATION
SEGGER reserves the right to revoke the right to use the software granted by
this license on a case-by-case basis. In this unlikely event, SEGGER will
provide the revocation notice in writing, allowing an adequate notice period.
APPLICABLE LAW, VENUE
German Law (with the exception of its rules for Conflicts of Law) applies.
Sole venue is Monheim/Rhein.
(c) 2020 - 2021 SEGGER Microcontroller GmbH www.segger.com info@segger.comCopyright © 2025 EmbITeK Co., Ltd. All Rights Reserved.

